CSCC85 - Fundamentals of Robotics
CSCC85 was divided into a few exercises and 3 major projects (with an optional project 0). Instead of a dedicated links section, I’ll walk through each one since they are all pretty unique. A course overview can be fond here for those interested. All these projects were in groups of 2, my partner being Noor Nasri
Project 0: Chocolate Launcher
The goal here was to get familiar with the tools we would be using in later projects, such as the Legos themselves and the bluetooth API in C. What we were supposed to build was a chocolate launching machine, with points awarded for creativity and ‘coolness’. The solution I came up with was a catapult where the release is controlled by rubber bands, and a disengage/reengage mechanism for actually launching.
Links
Project 1: Lander
The point of this project was to write a control program to successfully land a rover on goal on a surface as shown
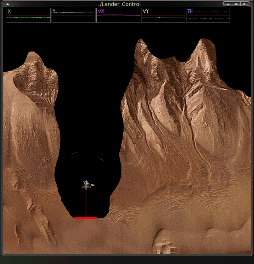
We were supposed to take into account sensor noise as well as control noise (from the rockets) as well as total failure of any of these components. I can’t share tha code since it could easily be copied, so just take my word that we did succeed in most scenarios :)
Project 2: Robot Localization
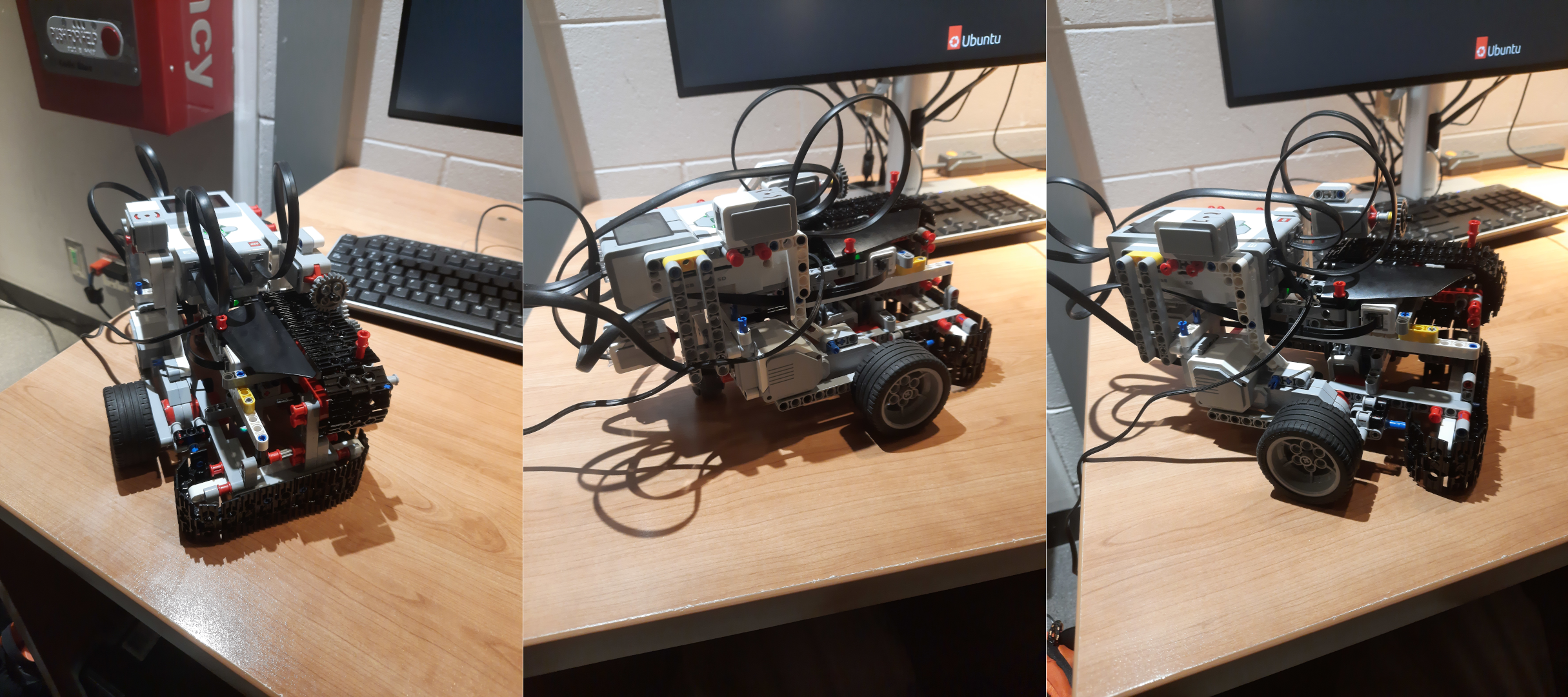
In this project, we were to build a robot that could read color mappings on a field so it could figure out where it was, then move to a defined location. This was done using a Markov localization, which uses probabilities to factor both control and sensor error. Below was our robot
Links
Project 3: Robosoccer
For this project, we were to build a robot to compete in ‘robosoccer’ - a simplified version of soccer where the goal was to put the ball in a ‘net’, as can be seen in the videos. The robot I built is as shown. More details about the robot are in the README of the github.
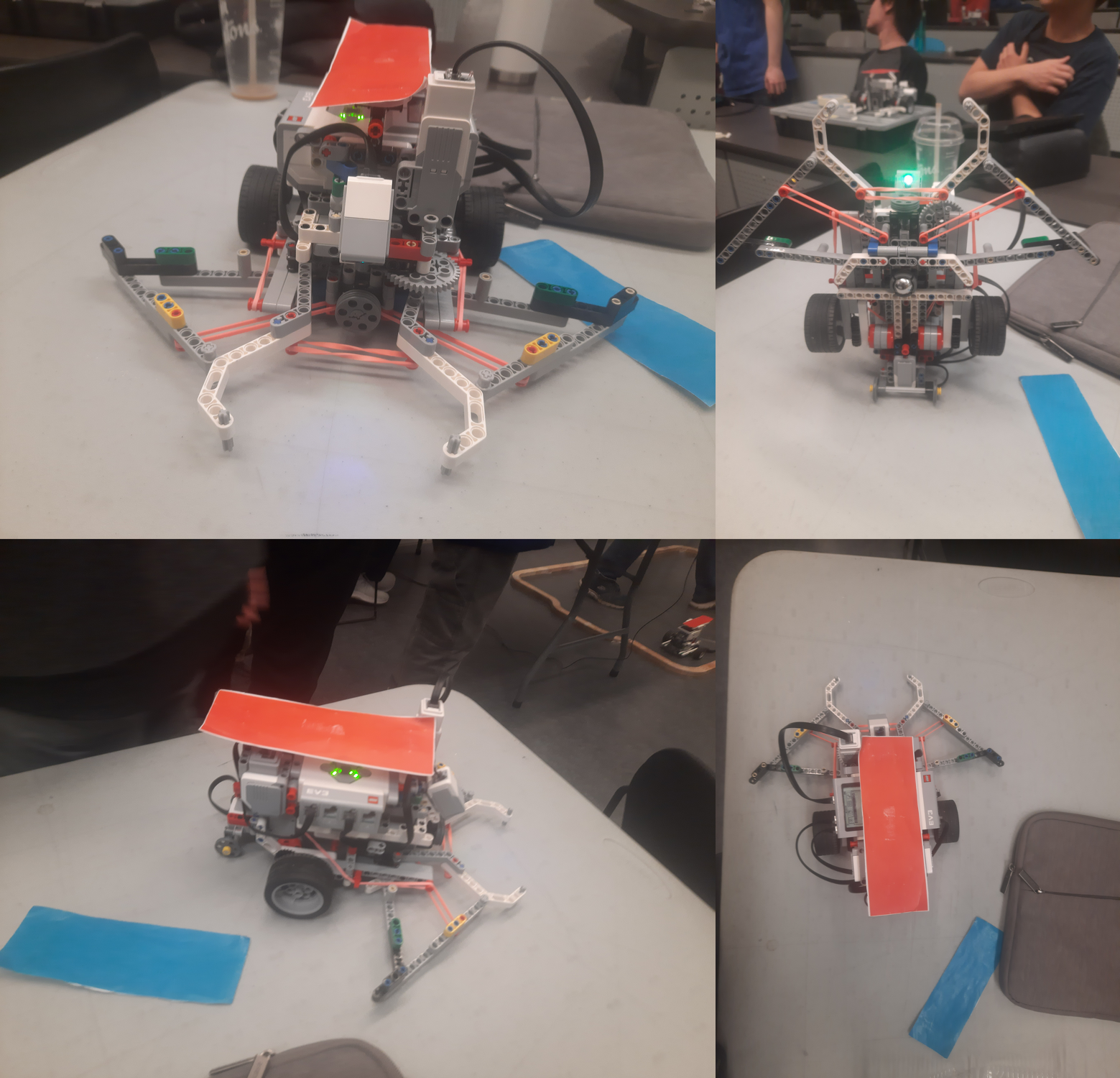
Field info was given through a computer vision API provided, which ran the control sequence each processed frame of an overhead camera. The robot was autonomous, controlled by a FSM that transitioned with each frame.